publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
- CHI’25
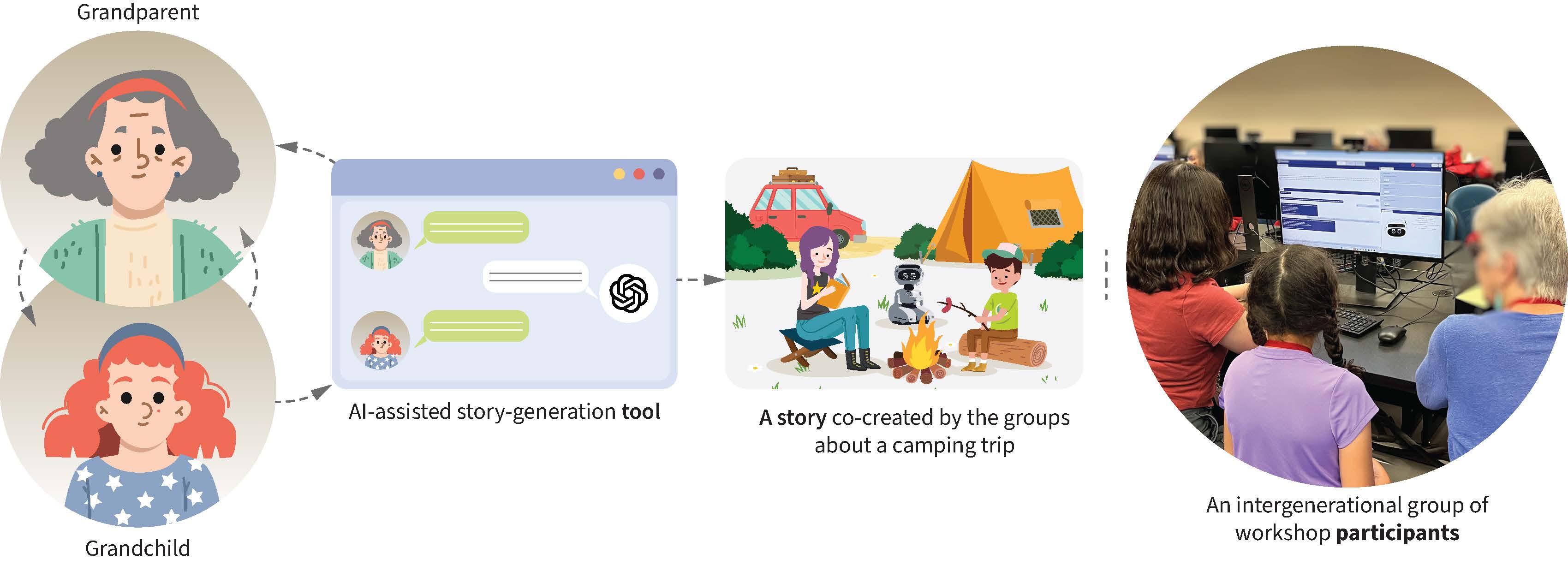 Bridging generations using ai-supported co-creative activitiesIn Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems, 2025
Bridging generations using ai-supported co-creative activitiesIn Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems, 2025
2024

2023

2022
- CHI’22
 The unboxing experience: Exploration and design of initial interactions between children and social robotsIn Proceedings of the 2022 CHI conference on human factors in computing systems, 2022
The unboxing experience: Exploration and design of initial interactions between children and social robotsIn Proceedings of the 2022 CHI conference on human factors in computing systems, 2022